
Page 94 - Ingeniantes Edicion especial 522 Interactiva
P. 94
Revista Ingeniantes 2018 Año 5 No. 2 Vol. 2
tamiento del amortiguador MR. La respuesta de fuer-
za-desplazamiento y fuerza-velocidad con corriente
variable fue establecida para el amortiguador; en el
proceso de expansión y retracción del pistón, la fuer-
za tiene un comportamiento de histéresis al aumentar
la corriente, con lo que se hizo posible ayudar en el
modelado de MR para aplicaciones de control.
De los trabajos anteriores se observa la existencia Figura 2 Estructura modular
diversas técnicas para el control y reducción de vi-
braciones, donde se muestra como requerimiento una La estructura consiste en elementos de tipo barra de
relación entre el control de vibración y el disipador de masa distribuible y nodos de masa concentrada. Lo
energía. El presente trabajo reporta el desarrollo de anterior con la finalidad de linealizar su comportamien-
un controlador para la reducción de vibraciones apli- to.
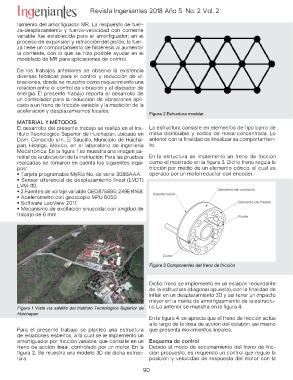
cado a un freno de fricción variable y la medición de la En la estructura se implementó un freno de fricción
aceleración y desplazamientos locales. como el mostrado en la figura 3. Dicho freno regula la
MATERIAL Y MÉTODOS fricción por medio de un elemento cónico, el cual es
El desarrollo del presente trabajo se realizó en el Ins- operado por un motorreductor con encoder.
tituto Tecnológico Superior de Huichapan, ubicado en
Dom. Conocido s/n., El Saucillo, Municipio de Huicha-
pan, Hidalgo, México, en el laboratorio de ingeniería
Mecatrónica. En la figura 1 se muestra una imagen sa-
telital de la ubicación de la institución. Para las pruebas
realizadas se tomaron en cuenta los siguientes equi-
pos:
• Tarjeta programable MyRio No. de serie 308BAAA.
• Sensor diferencial de desplazamiento lineal (LVDT)
LVM-110.
• 2 Fuentes de voltaje variable GEO875895, 249E14168.
• Acelerómetro con giroscopio MPU 6050.
• Software LabView 2017.
• Mecanismo de excitación sinusoidal con longitud de
trabajo de 6 mm.
Figura 3 Componentes del freno de fricción
Figura 1 Vista vía satélite del Instituto Tecnológico Superior de Dicho freno se implementó en un eslabón redundante
Huichapan de la estructura (diagonal opuesta), con la finalidad de
influir en un desplazamiento 3D y así tener un impacto
Para el presente trabajo se planteó una estructura mayor en la matriz de amortiguamiento de la estructu-
de eslabones esbeltos, a la cual se le implementó un ra. Lo anterior se muestra en la figura 4.
amortiguador por fricción variable, que consiste en un En la figura 4. se aprecia que el freno de fricción actúa
freno de acción lineal, controlado por un motor. En la a lo largo de la línea de acción del eslabón, así mismo
figura 2. Se muestra una modelo 3D de dicha estruc- que presenta movimientos lineales.
tura. Esquema de control
Debido al modo de accionamiento del freno de fric-
ción propuesto, es requerido un control que regule la
posición y velocidad de respuesta del motor con la
90